myCobot 320 for M5

1 Structural Parameters
1.1 Robot Parameters
| Indicator | Parameter |
|---|---|
| Name | myCobot 320 for M5 |
| Model | M5 |
| Effective working radius | 320 mm |
| Efficient Load | 1kg |
| Effective Arms Span | 320mm |
| Repeated Positioning Precision | ±0.5mm |
| Net Weight | 3kg |
| Power Input | 24V,5A |
| Operational Environment | -5°~45° |
| Communications | Network Interface USB Type-C |
1.2 Workspace
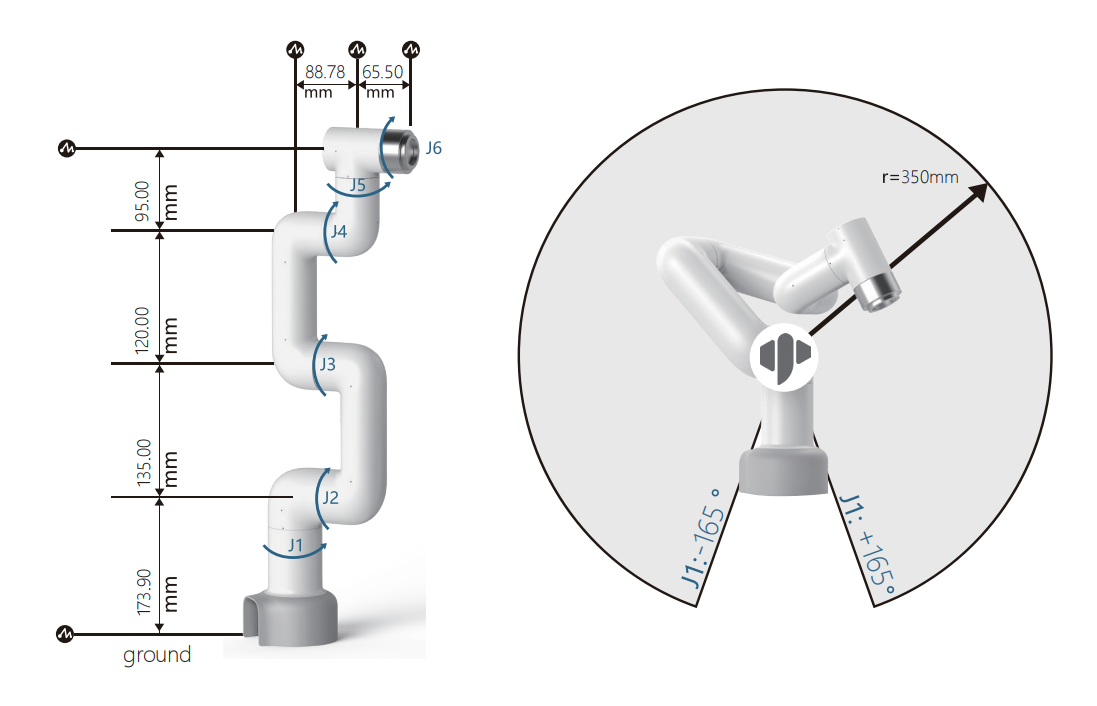
1.3 Joints Motion Angle
| Joint | Angle |
|---|---|
| J1 | -165~ +165 |
| J2 | -165~ +165 |
| J3 | -165~ +165 |
| J4 | -165~ +165 |
| J5 | -165~ +165 |
| J6 | -175 ~ +175 |
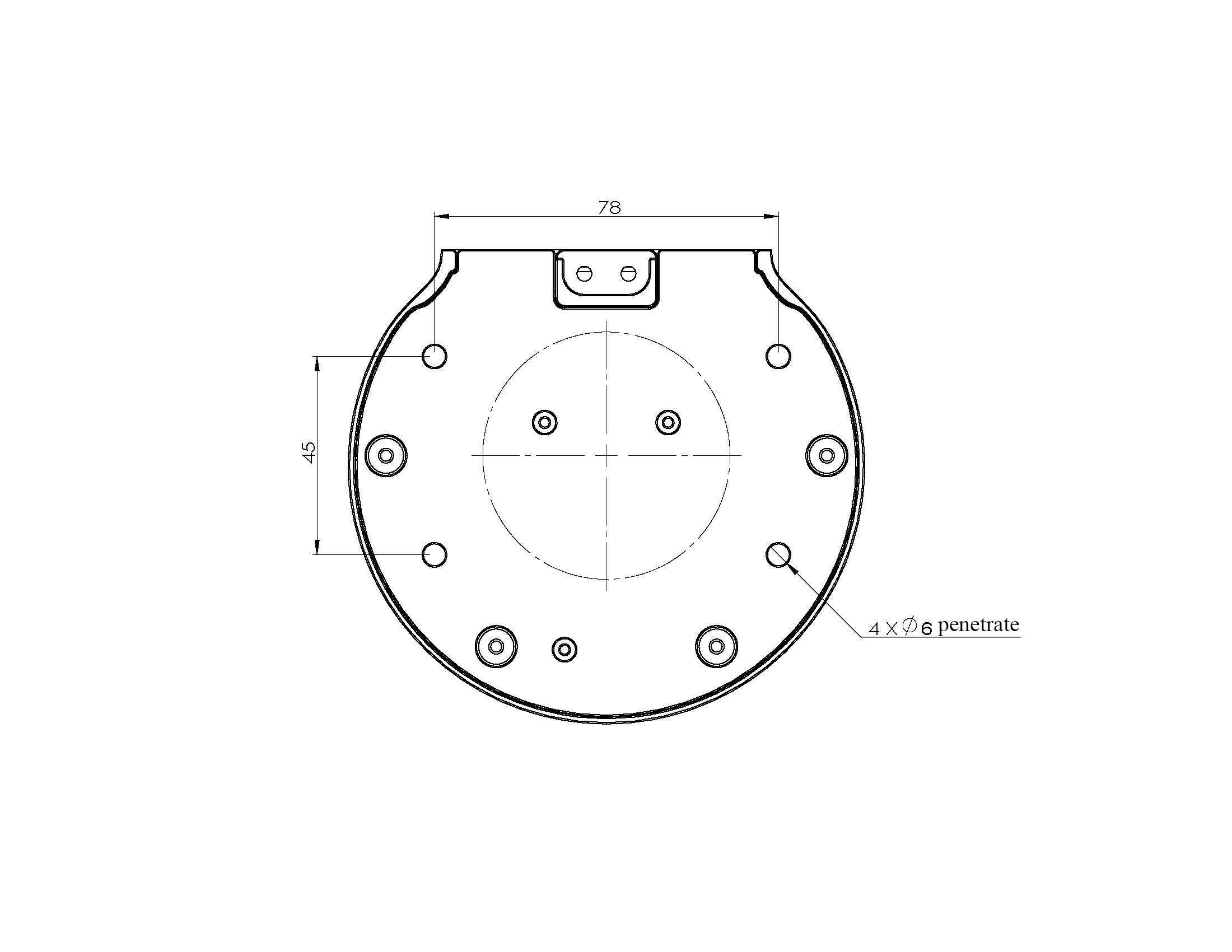
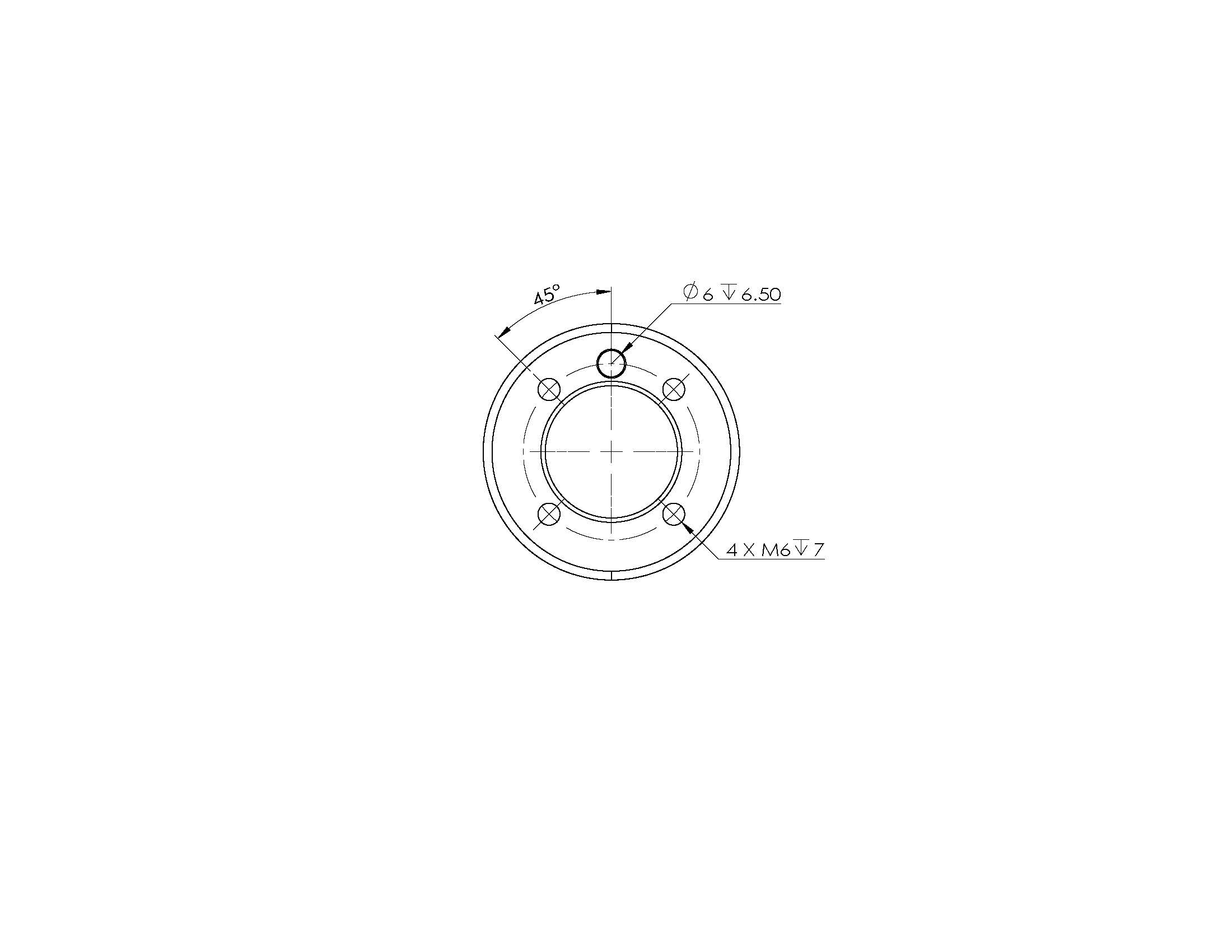
1.4 Hole Installation
- The base is mounted with flange and is compatible with both installation of LEGO and M6 screw.
- The end of the arm is mounted with flange and are compatible with threaded holes.
2 Electronic Parameters
| Index | Parameter |
|---|---|
| Master | ESP32 |
| Auxiliary Control | ESP32*2 |
| Bluetooth/Wireless | Available |
| TYPE-C | x 1 |
| Screen | x1 |
| custom button | Available |
| IO Interface | 4 |
| emergency stop | Available |
| LED | 2-inch |